Die verschiedenen MCU S2 Revisionen
Einen schnellen Überblick über die Unterschiede der verfügbaren und geplanten Revisionen der MCU S2 findest du in folgender Tabelle:
| Revision | Status | Lage- und Beschleunigungssensor | Besonderheit |
|---|---|---|---|
| Rev. 2.1 | Verfügbar | MPU-6050 oder ICM-42670P | 6-Achsen (Gyroskop + Beschleunigung) |
| Rev. 2.2 | In Entwicklung | ICM-20948 | 9-Achsen (zusätzl. Magnetometer/Kompass) |
Während der Entwicklung der senseBox MCU S2 wurden mehrere Revisionen entwickelt. Die folgende Übersicht zeigt dir die Unterschiede zwischen den einzelnen Revisionen.
Rev. 2.1
Die Revision 2.1 ist die erste regulär verfügbare Version der senseBox MCU S2.
Sie wurde in zwei technisch nahezu identischen Varianten veröffentlicht, die sich ausschließlich durch den verbauten Lage- und Beschleunigungssensor unterscheiden.
Hintergrund dafür waren Unsicherheiten in der Halbleiterverfügbarkeit nach der Corona-Krise. Um die Produktionsfähigkeit sicherzustellen, kamen zwei Sensoren zum Einsatz.
Der folgende Vergleich zeigt beide Varianten:
Unterschiede der Sensorvarianten
Merkmal | MCU S2 – MPU-6050 | MCU S2 – ICM-42670P |
|---|---|---|
Sensorachsen | 6 (3× Gyro, 3× Acc) | 6 (3× Gyro, 3× Acc) |
Temperatursensor | ✔ integriert | ✔ integriert |
Stromverbrauch | höher | geringer |
Messgenauigkeit | gut | höher |
Sensorgeneration | älter / etabliert | neuer |
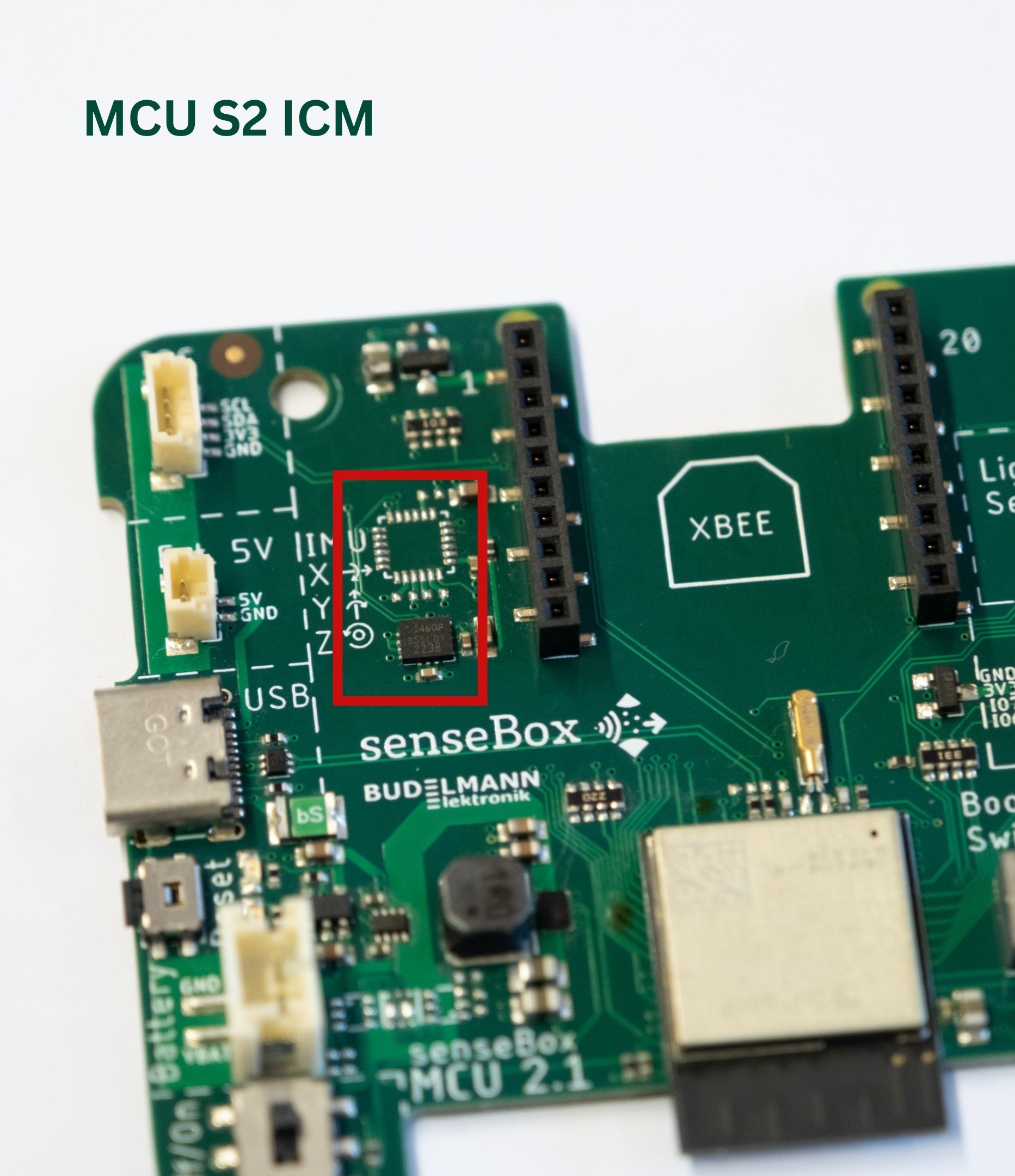
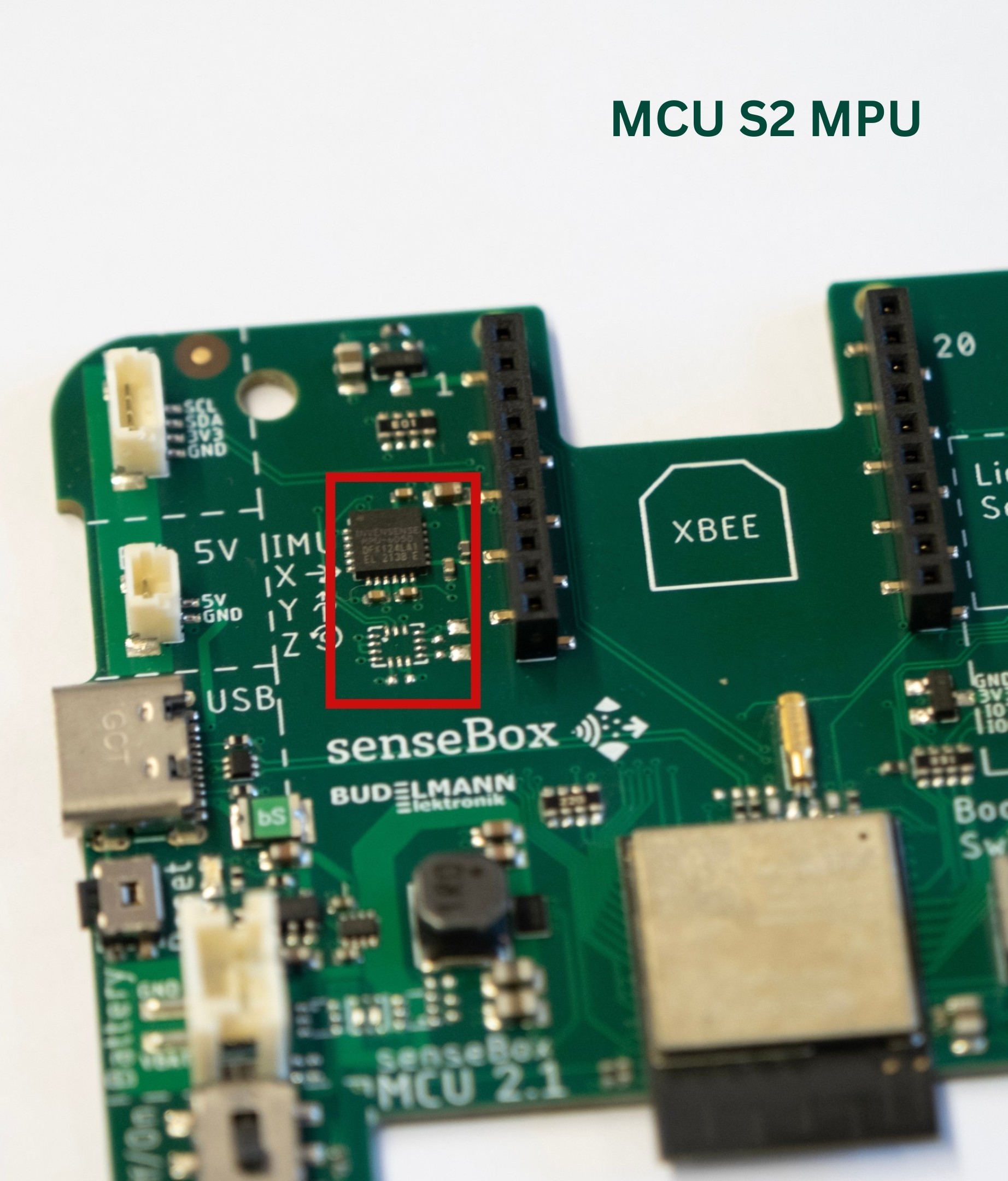
Identifikation der verbauten Version
Welche Variante du besitzt, erkennst du direkt auf der Platine:
- Chip auf der oberen Sensorfläche → MPU-6050 (größerer Chip)
- Chip auf der unteren Sensorfläche → ICM-42670P
Die Position befindet sich neben dem XBEE-Port (siehe Markierung im Bild).
Hinweise zur Programmierung
- Blockly erkennt den verbauten Sensor automatisch
- Arduino: Der korrekte Sensor muss manuell in der Software ausgewählt werden
Rev. 2.2 - Aktuelle Version (in Entwicklung)
Ab der Revision 2.2 wird nur noch eine Version mit einem ICM-20948 als Lage- und Beschleunigungssensor entwickelt. Dieser misst zusätzlich zu Beschleunigung und Drehbewegungen auch das Magnetfeld. Damit kann er zusätzlich sagen, in welche Himmelsrichtung das Gerät zeigt. Diese Revision befindet sich momentan noch in Entwicklung.